








- 登录


下载APP
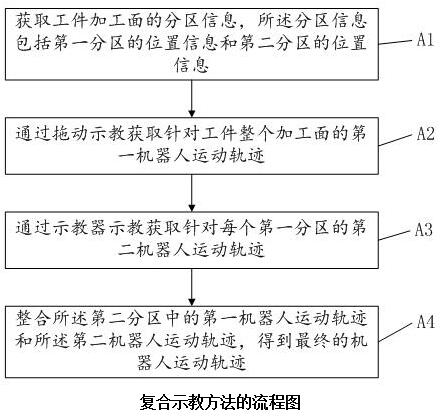
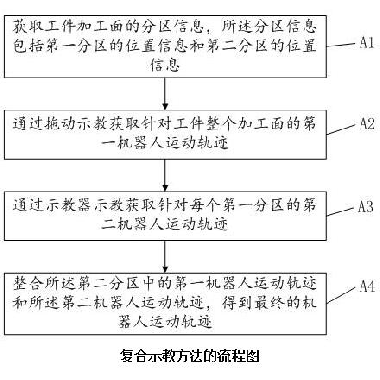
本发明提供了一种复合示教方法、装置和电子设备,通过获取工件加工面的分区信息,所述分区信息包括第一分区的位置信息和第二分区的位置信息;通过拖动示教获取针对工件整个加工面的第一机器人运动轨迹;通过示教器示教获取针对每个第一分区的第二机器人运动轨迹;整合所述第二分区中的第一机器人运动轨迹和所述第二机器人运动轨迹,得到最终的机器人运动轨迹;在机器人的作业场景中既包括简单的使用场景,也包括精度要求高的使用场景的情况下,使用该复合示教方法、装置和电子设备进行示教,既可保证精度要求,也可保证示教效率。
本发明涉及机器人技术领域,尤其涉及一种复合示教方法、装置和电子设备。


广东知识产权
公众号
下载知交地博会APP
